
Sensores de pozo del Laboratorio de Ingeniería Sísmica
Desde sus inicios en los años 1980, el personal del Laboratorio de Ingeniería Sísmica (LIS) se ha dado a la tarea de instalar acelerógrafos (instrumentos para la medición de sismos) en “campo libre”. El campo libre es aquella condición en superficie de un sitio en la que se puede registrar un sismo sin que la señal sea afectada por la interacción con las estructuras. También, se han colocado acelerógrafos en distintos niveles de edificios como hospitales, oficinas centrales del INS, torres Paseo Colón, entre otros, para monitorear el comportamiento de dichas estructuras a lo largo del tiempo.
Sin embargo, en el 2017, el LIS colocó por primera vez un sensor de pozo (llamado “borehole” en inglés) en el Jardín Botánico Lankester (JBL), ubicado en Paraíso de Cartago.
- El registro que se obtiene está por lo general libre de vibraciones producidas en superficie, por lo que se registran directamente los sismos y microtémores, estos últimos provienen de fuentes lejanas al sitio (tránsito vehicular, oleaje, viento), por lo que contienen información valiosa de las capas superficiales del suelo.
- Usualmente se colocan a varios metros de profundidad por lo que suele alcanzarse un nivel de roca o suelo competente, libre de efectos de amplificación.
- Identificación del comportamiento dinámico del suelo a partir del cálculo de la función de transferencia en tiempo real. Esto permite identificar los principales modos de vibración del sitio.
- Los registros obtenidos en profundidad son de gran utilidad para estudios como: atenuación de las ondas sísmicas, localización de eventos, obtención de registros en condición de roca, etc.
Este tipo de sensores de pozo tiene varias ventajas, entre ellas:
Se espera colocar otros sensores de pozo en distintos recintos de la UCR en los próximos años, de manera que se logre registrar información que permita mejorar áreas del conocimiento como: atenuación de las ondas sísmicas, amenaza sísmica, efectos de amplificación del suelo, localización de eventos, entre otros.
Ubicación.
Instalación.

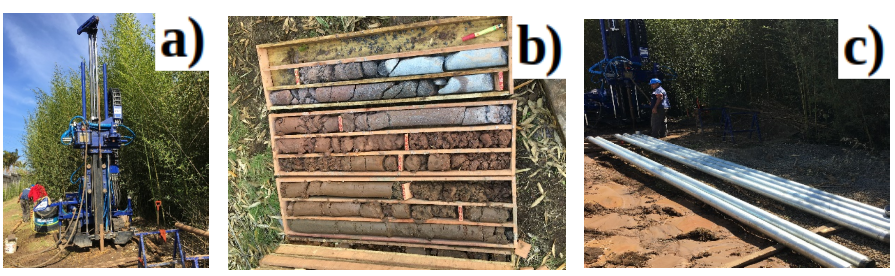
El procedimiento para la colocación del sensor borehole consiste en los siguientes pasos:
- Perforación en el sitio. En este caso se logró alcanzar los 30 m de profundidad, con un diámetro de 10 cm. Se colocó un encamisado en la perforación correspondiente a un tubo de hierro. Este evita que las paredes del suelo perforado colapsen, se impide que el pozo se inunde de agua y posibilita la sujeción del sensor en profundidad.
- Construcción en superficie de una caseta, con electricidad, internet y otras previstas. En el centro de esta se ubica el tubo correspondiente a la perforación, el digitalizador en superficie, la batería, el digitalizador y otros sistemas de conexión. De esta caseta también sale el cable de internet que permite transmitir los datos desde el digitalizador hasta un servidor ubicado en el Centro de Informática de la UCR. Para esto se han probado dos sistemas alternos: datacard y radio frecuencia. Una vez establecida la comunicación, los equipos se pueden configurar y modificar sus parámetros desde el LIS vía internet, sin necesidad de trasladarse al sitio.
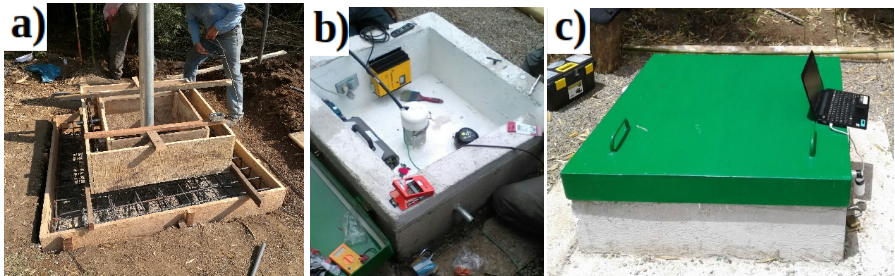
Figura 3. Caseta construida en superficie, con tapa y aislamiento para evitar el ingreso de agua e insectos. El tubo de la perforación fue cortado a unos 10 cm de la superficie. - Colocación del sensor de pozo y del sensor de superficie. Ambos son necesarios para conocer el comportamiento dinámico del suelo (identificación de principales modos de vibración). Fue necesario un trípode para bajar el sensor. Este se ancló en profundidad al tubo por medio de unas mandíbulas que sobresalen y que se accionan electrónicamente desde la superficie. Los cables del sensor (el de transmisión de datos y el que permite su descenso) debieron quedar sujetos a la caseta. Es importante indicar que el tubo de 30 m no lleva ningún relleno interno, por lo que el sensor de pozo puede llevarse nuevamente a la superficie fácilmente, en caso de que fuera necesario.
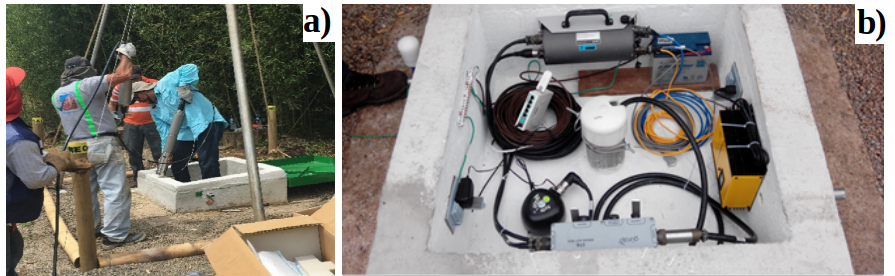
Figura 4. Proceso de colocación del sensor dentro del tubo. b) Disposición final de los componentes en superficie: cables, sistemas de conexión, digitalizador, batería, etc. - Procesamiento de los datos en tiempo real y su publicación a través de la página web del LIS. Generación de informes automáticos en caso de que se produzca un sismo fuerte.
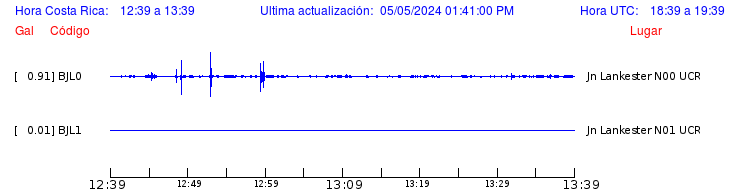
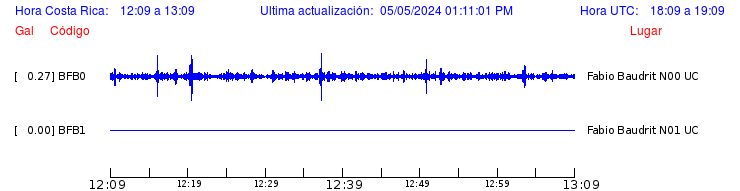
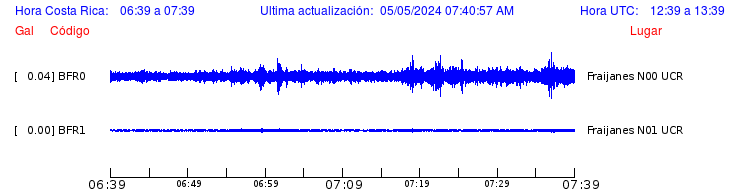
Al recibirse los datos en tiempo real, se grafican las trazas provenientes de los dos sensores y se publican en la página web del LIS (www.pozos.lis.ucr.ac.cr/?id=Lankester).
En forma semejante, se grafican los espectros de amplitud y el cociente espectral (razón entre los espectros del sensor de superficie y en el sensor en el pozo). Estas figuras se actualizan en pantalla aproximadamente cada 10 minutos, como se observa al principio de cada ficha de estación.
 Facebook
Twitter
Youtube
Telegram
MAS - LIS
Facebook
Twitter
Youtube
Telegram
MAS - LIS
Enlaces de interes:
www.lis.ucr.ac.crwww.rectoria.ucr.ac.cr
www.inii.ucr.ac.cr
www.ovsicori.una.ac.cr
www.rsn.ucr.ac.cr
www.cne.go.cr
www.lanamme.ucr.ac.cr
Preguntas frecuentes:
¿En que se diferencia un sismografo de un acelerografo?Más sobre el LIS
Funcionarios del LIS
Laboratorio de Ingeniería Sísmica
Instituto de Investigaciones en Ingeniería (INII)
Teléfono: 2511-6661
© 2009 - 2025 UCR

